

Note
Go to the end to download the full example code.
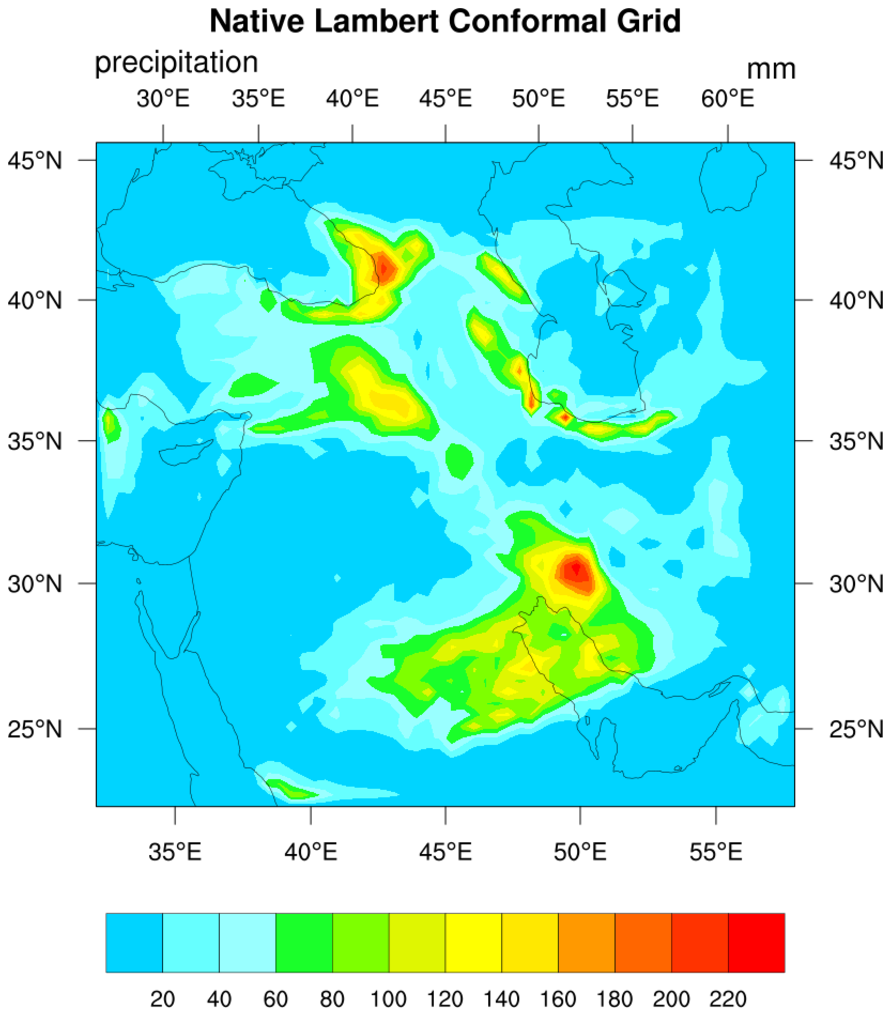
NCL_lcnative_1.py#
- This script illustrates the following concepts:
Drawing contours over a map using a native lat,lon grid
Drawing filled contours over a Lambert Conformal map
Zooming in on a particular area on a Lambert Conformal map
Subsetting a color map
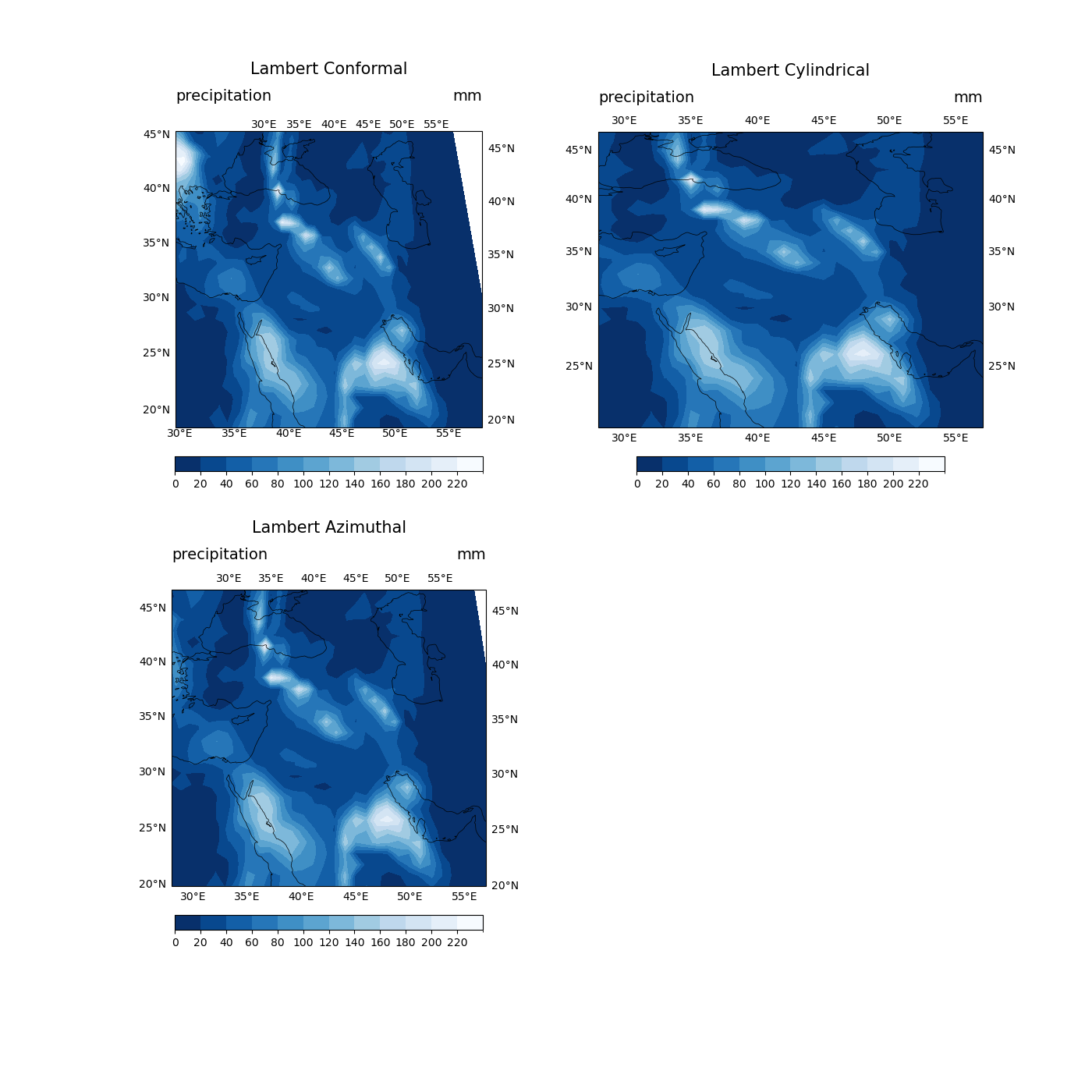
Using all three Cartopy Lambert projections to find the best fit for visualization
Implementing best practices for choosing contour color scheme. The original NCL version uses a rainbow color map which can create problems for individuals impacted by color blindness and is not black and white printer friendly. To overcome this, we used the “Blues_r” color scheme from Matplotlib. More information on best practices can be found here.
- See following URLs to see the reproduced NCL plot & script:
Original NCL script: https://www.ncl.ucar.edu/Applications/Scripts/lcnative_1.ncl
Original NCL plot: https://www.ncl.ucar.edu/Applications/Images/lcnative_1_lg.png
{kind=link}
Import packages:
import numpy as np
import xarray as xr
import cartopy.crs as ccrs
import matplotlib.pyplot as plt
import matplotlib.ticker as mticker
import geocat.datafiles as gdf
Read in data:
# Open a netCDF data file using xarray default engine and load the data into xarrays
ds = xr.open_dataset(gdf.get("netcdf_files/pre.8912.mon.nc"), decode_times=False)
# Extract a slice of the data
t = ds.pre.isel(time=0)
Plot:
plt.figure(figsize=(14, 14))
def Plot(row, col, pos, proj, title):
'''
Args:
row (:class: 'int'):
number of rows necessary for subplotting of visualizations
col (:class: 'int'):
number of columns necessary for subplotting
pos (:class: 'int'):
position of visualization in m x n subplot
proj (:class: 'cartopy.crs'):
which projection to visualize
title (:class: 'str'):
center title of respective visualization
'''
# Generate axes using Cartopy and draw coastlines
ax = plt.subplot(row, col, pos, projection=proj)
ax.set_extent((28, 57, 20, 47), crs=ccrs.PlateCarree())
ax.coastlines(linewidth=0.5)
# Use ax "gridlines" function to draw lat/lon markers on projections
gl = ax.gridlines(draw_labels=True, dms=False, x_inline=False, y_inline=False)
gl.top_labels = True
gl.right_labels = True
gl.xlines = False
gl.ylines = False
gl.xlocator = mticker.FixedLocator([30, 35, 40, 45, 50, 55])
gl.ylocator = mticker.FixedLocator([20, 25, 30, 35, 40, 45])
gl.xlabel_style = {'rotation': 0}
gl.ylabel_style = {'rotation': 0}
"""When using certain types of projections in Cartopy, you may find that
there is not a direct 1-to-1 projection similarity.
When looking at the three Lambert projections offered, you will
notice the closest match to the NCL projection is actually the
Lambert Cylindrical projection. This is due to NCL having certain
"smoothing" and "flattening" options for the Lambert Conformal
projection not seen in the Cartopy version. By using Lambert
Cylindrical over Lambert Conformal in Python, you will be able to
create the "rectangular" style of coordinates not classically
represented by a Lambert Conformal map. Additionally, Cartopy does
not currently support adding tick marks to a projection like NCL,
this is why these Python projections do not have this feature. The
GeoCAT Team is actively adding to the list of convenience functions
supported and hopes to add this functionality one day.
"""
# Plot data and create colorbar
prec = t.plot.contourf(
ax=ax,
cmap="Blues_r",
transform=ccrs.PlateCarree(),
levels=14,
add_colorbar=False,
)
cbar_ticks = np.arange(0, 240, 20)
cbar = plt.colorbar(
prec, orientation='horizontal', pad=0.075, shrink=0.8, ticks=cbar_ticks
)
cbar.ax.tick_params(labelsize=10)
plt.title(title, loc='center', y=1.17, size=15)
plt.title(t.units, loc='right', y=1.08, size=14)
plt.title("precipitation", loc='left', y=1.08, size=14)
Plot(
2,
2,
1,
ccrs.LambertConformal(
central_longitude=45, standard_parallels=(36, 55), globe=ccrs.Globe()
),
"Lambert Conformal",
)
Plot(2, 2, 2, ccrs.LambertCylindrical(central_longitude=45), "Lambert Cylindrical")
Plot(2, 2, 3, ccrs.LambertAzimuthalEqualArea(central_longitude=45), "Lambert Azimuthal")
Total running time of the script: (0 minutes 1.958 seconds)